

Mint egy jó receptben.
Hozzávalók:




Egyéb hozzávalók:
- ATmega8 mikrokontroller 1db
- 2×5 tüskesor 1db
- 10K ellenállás 5db
- mikrokapcsoló 2db
- billenő kapcsoló 1db
- elemtartó 4x AA 1db
- elemtartó 2x AA 1db
- 4MHz kristály 1db
- 22pF kondenzátor 2db
- 1000uF kondenzátor 2db
- L7805CV 5V stabilizátor 1db
- tördelhető 1 soros tüskesor 1db (opcionális)
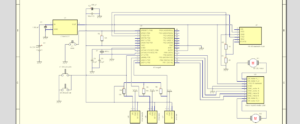
Kapcsolási rajz:
Mivel a robot próbanyákra készült el, ezért vissza kel fejtenem az áramkört, csak most, csak nektek, tessék értékelni 🙂
Lábkiosztások:

Innen vettem : http://www.instructables.com/id/Arduino-Modules-L298N-Dual-H-Bridge-Motor-Controll/
Program:
Az androidos távvezérlő program letölthető innen. Az applikáció nem az én szellemi termékem de freeware. Benne hagytam a távvezérlős funkciót, ha kétszer nyomjuk meg az előre gombot a robot felgyorsul, de az infrák itt is beavatkoznak, ha neki akarsz hajtani valaminek megpróbálja elkerülni. (több-kevesebb sikerrel :D) Anno nem voltam tisztában a PWM lábak jelentőségével, így leprogramoztam, szoftverből csinálja. Feltaláltam a sajton a lyukat igen. 🙂
Letölthető itt: robot programja, forráskód, kapcsolási rajz