

Hát persze, hogy klikk vadász a cím. 🙂 Ha a médiának lehet akkor nekem is …
A fiam elromlott TESCO-ban vásárolt távirányítós autójáról van szó, amit úgy felturbóztam, hogy porosabb talajon driftel 😀
A mostani játékok elektronikájára jellemző, hogy ha egyszer elromlik mehet a kukába, mert javíthatatlan. Ha szétbontod találsz benne egy áramkört aminek a közepén egy műgyantával leöntött paca van, és max néhány ellenállást kondenzátort tartalmaz. A fenti autónál is ez volt. Így fogtam az egész elektronikát és veszélyes hulladéknak leadtam, távirányítóval együtt. Viszont ha már a veszélyes hulladéknál tartunk, volt egy laptop akkumulátorom ami elhalálozott. Tudni kell, hogy ezek az akkuk több cellából állnak és nem egyszerre pusztul el az összes. 1-2 cella benne feladja, és a „védőáramköre” biztonsági okokból letiltja a töltést. Természetesen ennek semmi köze a tervezett elavuláshoz, bárminemű ezzel való összekapcsolása a témának a véletlen műve. (remélem egyet értetek kedves gyártók) Szétkaptam az akkut, kiszedtem belőle a működő cellákat, és már is volt egy amper-centrikus erőforrásom ingyen. 3,7V cellákról van szó, az autó kapott sorba kötve 3 db-ot az 11,1V. Eredetileg 4db ceruza elemmel működött, az 6V. Hogy, le fog égni majd a motor, igen le fog egyszer ha túl hajtjuk de addig remekül szórakozunk. 😀
Természetesen Arduino pro mini áramkörökkel építettem fel mind az adó, mind a vevő áramkört 1-1 433MHz-n működő adó-vevő modullal virtual-wire osztály felhasználásával. Még a lebegény (légpárnás) készítésének idejéből polcon hevert egy apró szervó motor, ez szabályozza a kanyarodást. Találkoztam azzal az inkompatibilitási problémával, hogy az Arduio alap szervovezérlési modulja nem kompatibilis a virtual-wire class-al, így ki kellett cserélnem a modult és egy másik szervovezérlési modult használnom. Természetesen mindent mellékelek. És akkor…
Hozzávalók:




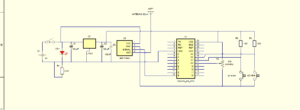
Kapcsolási rajz távirányító:
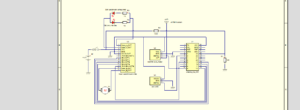
Kapcsolási rajz autó:
Működés:
Azt hiszem a működést nem kell különösebben részleteznem. Röviden annyi, hogy a távirányító potméter állását leolvassa az AD átalakító ami a Pro Miniben van ebből generálódik egy szám (ez a kormányállás) ennek a számnak a végére hozzácsapunk egy karaktert 0-> áll, 1->előre, 2->hátra és ez kerül elküldésre.
Az autóban az Arduino modul visszaalakítja ezt a számot és értelmezi. Először szétszedi kormányállásra és irányra, majd a kormányállásból generál egy szervó állást. A többi értelem szerű. Program forráskódjában erősen kommenteltem. Még annyit, hogy a távirányítóban lehet használni az Arduino pro mini butábbik verzióját is amelyben ATmega165 van. Mert olcsóbb. 🙂
Programok:
Végeredmény:

Na meg a videó (részeg sofőrrel) 😀 :