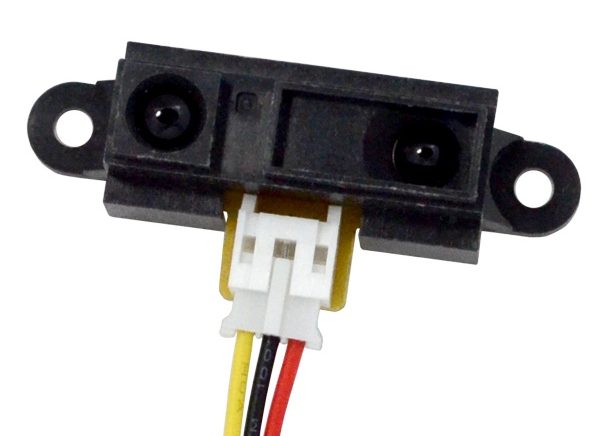
Sharp GP2Y0A41SK0F és GP2Y0A21SK0F analóg, infra távolságmérő szenzorok 4-40cm az első valamint 10-80cm távolságig működik az utóbbi. Arduinoval nagyon könnyen használható egyetlen analóg bemenet szükséges hozzá. Pontossága +-2cm. Akadály kerülő robot készítéséhez alkalmas, vagy egyéb fotocellás alkalmazásokhoz. Kezdőknek ajánlom pofonegyszerű használata miatt.
Az androidos távvezérlő program letölthető innen. Az applikáció nem az én szellemi termékem de freeware. Benne hagytam a távvezérlős funkciót, ha kétszer nyomjuk meg az előre gombot a robot felgyorsul, de az infrák itt is beavatkoznak, ha neki akarsz hajtani valaminek megpróbálja elkerülni. (több-kevesebb sikerrel :D) Anno nem voltam tisztában a PWM lábak jelentőségével, így leprogramoztam, szoftverből csinálja. Feltaláltam a sajton a lyukat igen. 🙂
Ez a weboldal sütiket használ. Az Uniós törvények értelmében kérem, engedélyezze a sütik használatát, vagy zárja be az oldalt. További információ
Az Uniós törvények értelmében fel kell hívnunk a figyelmét arra, hogy ez a weboldal ún. "cookie"-kat vagy "sütiket" használ. A sütik kicsik, teljesen veszélytelen fájlok, amelyeket a weboldal azért helyez el az Ön számítógépén, hogy minél egyszerűbbé tegye Ön számára a böngészést. A sütiket letilthatja a böngészője beállításaiban. Amennyiben ezt nem teszi meg, illetve ha az "Elfogadom" feliratú gombra kattint, azzal elfogadja a sütik használatát.